一.關于環形軌道運料電動葫蘆的控制
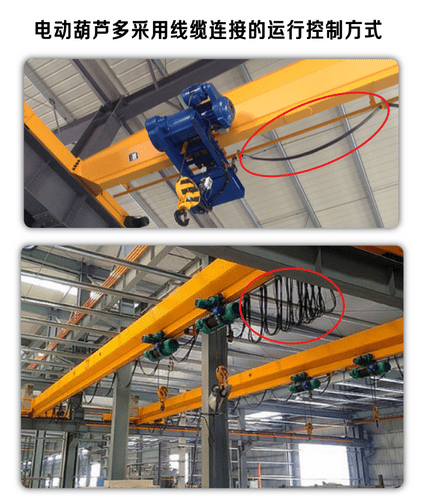
目前電動葫蘆的控制部分都是由PLC完成的,每個電葫蘆內都有一臺PLC,主站PLC一般設置在地面控制機柜內。由于電葫蘆是在半空中移動工作的,與地面PLC的通訊問題一直是電葫蘆設備運行中棘手的問題。采用有線拖纜線的方式,由于觸發動作頻繁和移動作業等因素,線纜磨損嚴重,損壞后維修不方便,耽誤生產。故考慮采用PLC無線通訊方案,來完成電葫蘆與地面PLC之間的通訊問題。
二.環形軌道運料電動葫蘆無線控制系統的組成
新型材料企業,新建廠房原材料車間,需要實現4組環形軌道上共48個電動葫蘆與地面控制柜之間的無線通訊,不再采用有線通訊。
設計要求:
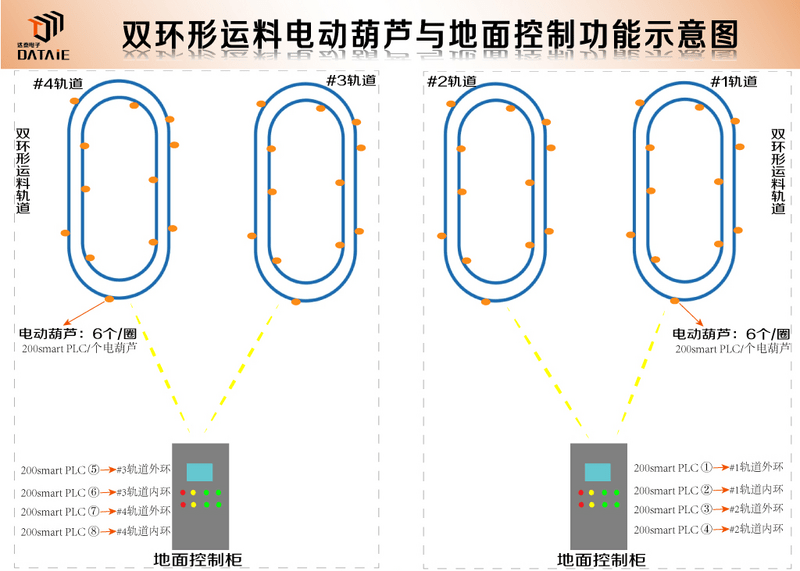
1、車間內共有4組環形軌道,每一組分為內圈和外圈的雙軌運行方式。
2、2臺地面控制柜,每個地面控制柜內裝有4臺S7-200smart PLC,作為每組電葫蘆的主控設備。
3、每圈軌道上裝有6個電動葫蘆,【4組*(2圈/內外)*(6個電葫蘆/圈)】共計48個電葫蘆,均采用西門子S7-200 SMART PLC作為邏輯控制器,與地面控制箱的S7-200smart PLC實現1主6從無線通訊,通訊協議為Profinet。
4、每組電動葫蘆與地面控制柜距離約100米左右,中間有較多鋼架結構隔擋。
5、4組雙軌運行電動葫蘆通過地面控制柜端的觸摸屏來控制,操作員根據生產需求來控制;或者通過配備的手持遙控終端來無線控制對應的電動葫蘆完成作業。
三.環形軌道運料電動葫蘆無線控制系統的功能
考慮到現場運料工作環境復雜,外部干擾源也較多,車間內多為鋼架結構建筑。同時無線方案的設計還需考慮到多個電葫蘆移動時集體移動停止、單個移動停止、掛鉤上下、急停等工作場景;且需保證不論電葫蘆移動到哪里,都能夠與地面控制柜實現穩定和高實時性的數據交互,避免出現相互干擾,誤動作,通訊延遲等狀況。因而,可選用廠區傳輸距離1公里的西門子PLC無線通訊終端DTD418MB來實現地面控制柜與電動葫蘆之間的數據交互。
無線通訊方案示意圖 ▼

在地面控制柜內的S7-200smartPLC端與每個電動葫蘆控制箱內S7-200smart PLC端分別安裝一塊DTD418MB,接口采用Rj45口,通訊協議為Profinet協議,實現1主6從無線通訊。8條環形軌道,各為一組系統,共需要使用56個DTD418MB來實現生產車間地面控制柜與電葫蘆PLC之間的無線通訊功能。
 滬公網安備31010802001143號
滬公網安備31010802001143號

